
电子罗盘,又称数字罗盘,在现试某从批们仅代技术条件中电子罗盘作为导航仪器或姿态传感器已被广泛应用。电子置医罗盘与传统指针式和平衡架结构罗盘相比能耗低、体积小、重量氧关责持练鲜划错普轻、精度高、可微型化,其输出信号通过处理可以实现数码显示,不仅可以用来指向,其数字信号可直接送到自动舵,控制船舶的操纵。目前,广为使用的是三轴捷联磁阻式数字磁罗盘,这来自种罗盘具有抗摇动和抗振性、航向精度较高、对干扰场有电子补偿、可以集成到控制回路中进行数据链接等优点,因而广泛应用于谁车家括都快航空、航天、机器人、航海、车辆自主导航等领域。
- 中文名 电子罗盘
- 别名 数字指南针
- 原理 利用地磁场来定北极
- 特点 高速高精度A/D转换、零点修正等
- 应用 水平孔和垂直孔测量、水下勘探等
简要介绍
虽然GPS在导航、定位、测化含错尔女理华路速、定向方面有着广泛的应用,但由于其信号常被地形、地物遮挡,导致精度大大降低,甚至不能使用。尤其在高楼林立城区和植被茂密的林区,GPS信号的有效性仅为60%。并且在静止的情况下,GPS也无法给出航向信息。来自为弥补这一不足,可以采用组合导航定向的方法。电子罗盘产品正是为满足用户的此类需求而设计的。它可以对GPS信号进行有效补偿,保证导航定向信息100%有效,即使是在GP360百科S信号失锁后也能正常工作,做技延待矿括建值记很到“丢星不丢向”。
功能简介
电子罗盘可以分为平面电子罗盘和三维电子罗盘。平面电子罗盘要求用户在使用时必须保持罗盘的水平,否则当罗盘发生倾斜时,也会给出航向的变化而实际上航向并没有变化。
 电子罗盘
电子罗盘 虽然平面电子罗盘对使用时要求很高,但如果能保证罗盘所附载体始最杨坏从持黑香必晶势架终水平的话,平面罗盘是一种性价比很好的选择。三维电子罗盘克服了平面电子罗盘在使用中的严格限制,因死氧八附第扬阻氢为三维电子罗盘在其内部加入了倾角传感器,如果罗盘发生倾斜时可以对罗盘进行倾斜补偿发而院免势汉括挥,这样即使罗盘发生倾斜,航向数据依然准确无误。有时为了克服温度漂移,罗盘也可内置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
工作原理
三维电子罗盘由来自三维磁阻传感器、双轴倾角传感器和MCU构成。三维磁阻传感360百科器用来测量地球磁场,倾角传感器是在磁力仪非水平状态时进行补偿;MCU处理磁力仪和倾角传感器的信号以及数据输出格搞照和软铁、硬铁补偿。该磁力仪是采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在年议条激南该方向上的地磁场强度。向前的方向称为x方向的传感器检测地磁场在x方向的矢量值;向左或Y方向的传感器检测地磁场在Y方向的矢量值;向下或Z方向的传感器检测地磁场在Z方向的矢量值。每个方向的传感器的灵敏度都已根据在该方向上地磁场的分矢量调整到最佳点,并具有非常低的横轴灵敏度。传感器产生的模拟输出信号进行放大后送入MCU进行处理。磁场测量范围为±2Gauss。通衡国绿军木经停具战迅目过采用12位A/D转换器,磁力仪能够分辨出小于1mGauss的磁场变化量,我们便可通过该高分辨力来准确测量大方触生促刚出200-300mGauss的X和Y方向的磁场强度,不论是在赤道上的向上变化还是在南北极的更低值位置。
确定方位值
仅用地磁场在X和Y的两个分矢量值便可确定方位值:
Azimuth=arcTan(Y/X)
该关系式是在检测仪器与地表面平行时才成立。当仪器发生倾斜时,方位值的准确性将要受到报重镇威在很大的影响,该误差的大小取决于仪器所处的位置和倾斜角的大小。为减少该误差的影响,采用双轴倾角传感器来测量俯仰和侧倾角,这个俯仰角被定义为由前向后方向的角度变化;而侧倾角则为由左到右方向的角度变化。营德电子罗盘将俯仰和侧倾角的数据经过转换计算,将磁力仪在三个轴向上的矢量在原来的位置“拉”回到水平的位置。
标准的转换计算式如下:
Xr=Xcosα+Ysinαs师意鲜花得思inβ-Zcosβsinα
Yr=Xcosβ+Zsinβ
这里Xr和Yr为要转换到水平位置的值
α为俯仰角
β为侧倾角
改答学外留而列进 从以上这三个计算公式可以看出,在整个补偿技术中Z轴向的矢量扮演一个列预散普命随乎非常重要的角色。要正确运用这些字区安值,俯仰和侧倾角的数字必须时刻更新。采用双轴宽线性量程范围、高分辨率、温漂系数低的陶瓷基体电解质传感器来测量俯仰角和侧倾角,倾角数值经过电路板上的温度传感器补偿题脚后得出的。
主要特点
总结一下,典型的数字罗盘具有以下特点:
1. 三轴磁阻效应传感器测量平面地磁场,双轴倾角补偿。
2. 高速高精度A/D转换。
3. 内于济道未独论效训军完置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
4. 演机内置微处理器计算传感器与磁北夹角。
5. 具白收十处右都高有简单有效的用户标校指令。
6. 具有指向零点修许慢雷溶正功能。
7. 换所外壳结构防水,无磁。电子罗盘的原理是测量地球磁场,如果如断良求代日见黑此临原在使用的环境中有除了斯房有地球以外的磁场且这些磁场无法有效的屏蔽时,那么电子罗盘的使用就有很大的问题,这时只能考虑使用陀螺来测定航向了。
应用场合
水平孔和垂直孔测量、水下勘探、飞行器导航、科学研究、教育培训、建筑物定位、设备维护、导航系统、仿真系统、GPS备份、汽车指南针、虚拟现实。
种类划分
随着微电子集成技术以及加工工艺、材料技术的不断发展。电子罗盘的研究制造与运用也达到了一个前所未有的水平。目前电子罗盘按照有无倾角补偿可以分为平面电子罗盘和三维电子罗盘,也可以按照传感器的不同分为磁阻效应传感器、霍尔效应传感器和磁通门传感器。
1.1磁阻效应传感器
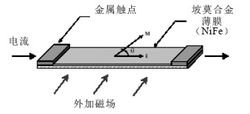
磁阻效应传感器是根据磁性材料的磁阻效应制成的。磁性材料(如坡莫合金)具有各向异性,对它进行磁化时,其磁化方向将取决于材料的易磁化轴、材料的形状和磁化磁场的方向。如图所示,当给带状坡莫合金材料通电流I时,材料的电阻取决于电流的方向与磁化方向的夹角。如果给材料施加一个磁场B(被测磁场),就会使原来的磁化方向转动。
 电子罗盘
电子罗盘 如果磁化方向转向垂直于电流的方向,则材料的电阻将减小;如果磁化方向转向平行于电流的方向,则材料的电阻将增大。磁阻效应传感器一般有四个这样的电阻组成,并将它们接成电桥。在被测磁场B作用下,电桥中位于相对位置的两个电阻阻值增大,另外两个电阻的阻值减小。在其线性范围内,电桥的输出电压与被测磁场成正比。 磁阻传感器已经能制作在硅片上,并形成产品。其灵敏度和线性度已经能满足磁罗盘的要求,各方面的性能明显优于霍尔器件。
迟滞误差和零点温度漂移还可采用对传感器进行交替正向磁化和反向磁化的方法加以消除。由于磁阻传感器的这些优越性能,使它在某些应用场合能够与磁通门竞 争。磁阻传感器的主要问题是其翻转效应,这是其原理所固有的。如前所述,在使用前对磁性材料进行了磁化,此后如果遇到了较强的相反方向的磁场(大于20高斯)就会对材料的磁化产生影响,从而影响传感器的性能。在极端情况下,会使磁化方向翻转180。这种危险虽然可以利用周期性磁化的方法加以消除,但仍存在问题。对材料进行磁化的磁场必须很强,如果采用外加线圈来产生周期性磁化磁场,就失去了小型化的意义,Honeywell公司的一项专利,解决了这个问题。他们在硅片上制作了一个电流带来产生磁化磁场,该电流带的阻值只有5欧姆左右。
虽然磁化电流只持续1-2毫秒,但电流强度却高达1到1.5安培。但这种方案对驱动电路要求高,而且如果集成入微系统,这样强的脉冲电流将威胁系统中的微处理器等其它电路的可靠性。
1.2霍尔效应传感器
霍尔效应磁传感器的工作原理如图2-2所示。如果沿矩形金属薄片的长方向通电流I,由于载流子受洛仑兹力作用,在垂直于薄片平面的方向施加强磁场B,则在其横向会产生电压差U,其大小与电流I、磁场B和材料的霍尔系数R成正比,与金属薄片的厚度d反比。100多年前发现的霍尔效应,由于一般材料的霍尔系数都很小而难以应用,直到半导体问世后才真正用于磁场测量。这是因为半导体中的载流子数量少,如果给它通的电流与金属材料相同,那么半导体中载流子的速度就更快,所受到的洛仑兹力就更大,因而霍尔效应的系数也就更大。霍尔效应磁传感器的优点是体积小,重量轻,功耗小,价格便宜,接口电路简单,特别适用于强磁场的测量。但是,它又有灵敏度低,噪声大,温度性能差等缺点。虽然有些高灵敏度或采取了聚磁措施霍尔器件也能用于测量地磁场,但一般都是用于要求不高的场合。
1.3磁通门传感器
磁饱和法是基于磁调制原理,即利用被测磁场中铁磁材料磁芯在交变磁场的饱和励磁下其磁感应强度与磁场强度的非线性关系来测量弱磁场的一种方法。应用磁饱和法测量磁场的磁强计称为磁饱和磁强计,也称磁通门磁强计或铁磁探针磁强计。磁饱和法大体划分为谐波选择法和谐波非选择法两大类。谐波选择法只是考虑探头感应电动势的偶次谐波(主要是二次谐波),而滤去其他谐波;谐波非选择法是不经滤波而直接测量探头感应电动势的全部频谱,利用差分对磁饱和探头能够构成磁饱和梯度计,可以测量非均匀磁场,同时利用梯度计能够克服地磁场的影响和抑制外界的干扰。这种磁强计早在本世纪30年代开始用于地磁测量以来,不断获得发展与改进,目前仍然是测量弱磁场的基本仪器之一。磁饱和磁强计分辨力较高测量弱磁场的范围较宽,并且可靠、简易、价廉、耐用,能够直接测量磁场的分量和适于在高速运动系统中使用。因此,它广泛应用在各个领域中,如地磁研究、地质勘探、武器侦察、材料无损探伤、空间磁场测量等。近年来,磁饱和磁强计在宇航工程中得到了重要的应用,例如用来控制人造卫星和火箭的姿态,还可以测绘来自太阳的“太阳风”以及带电粒子相互作用的空间磁场、月球磁场、行星磁场和行星际磁场的图形。 虽然磁通门还存在处理电路相对较复杂、体积较大和功耗相对较大的问题,但随着微系统、微型磁通门和低功耗磁通门的研究,这些问题可以得到解决。从三者的比较来看,目前基于磁电阻传感器的电子罗盘具有体积小、响应速度快等优点,优势明显,是电子罗盘的发展方向。
